










Die Roboter sollen als intelligenter Schwarm koordiniert abtauchen und mit Sonartechnologie den Meeresboden erkunden.
Wie können autonome Roboter die Unterwasserforschung verbessern? euronews-Reporter Julián López Gómez hat bei einem Testlauf in Sines, in Portugal zugeschaut. WiMUST heißt das europäische Forschungsprojekt. Dabei kommt ein ganzer Roboterschwarm zum Einsatz, um mithilfe der Sonartechnologie den Meeresboden zu erforschen.
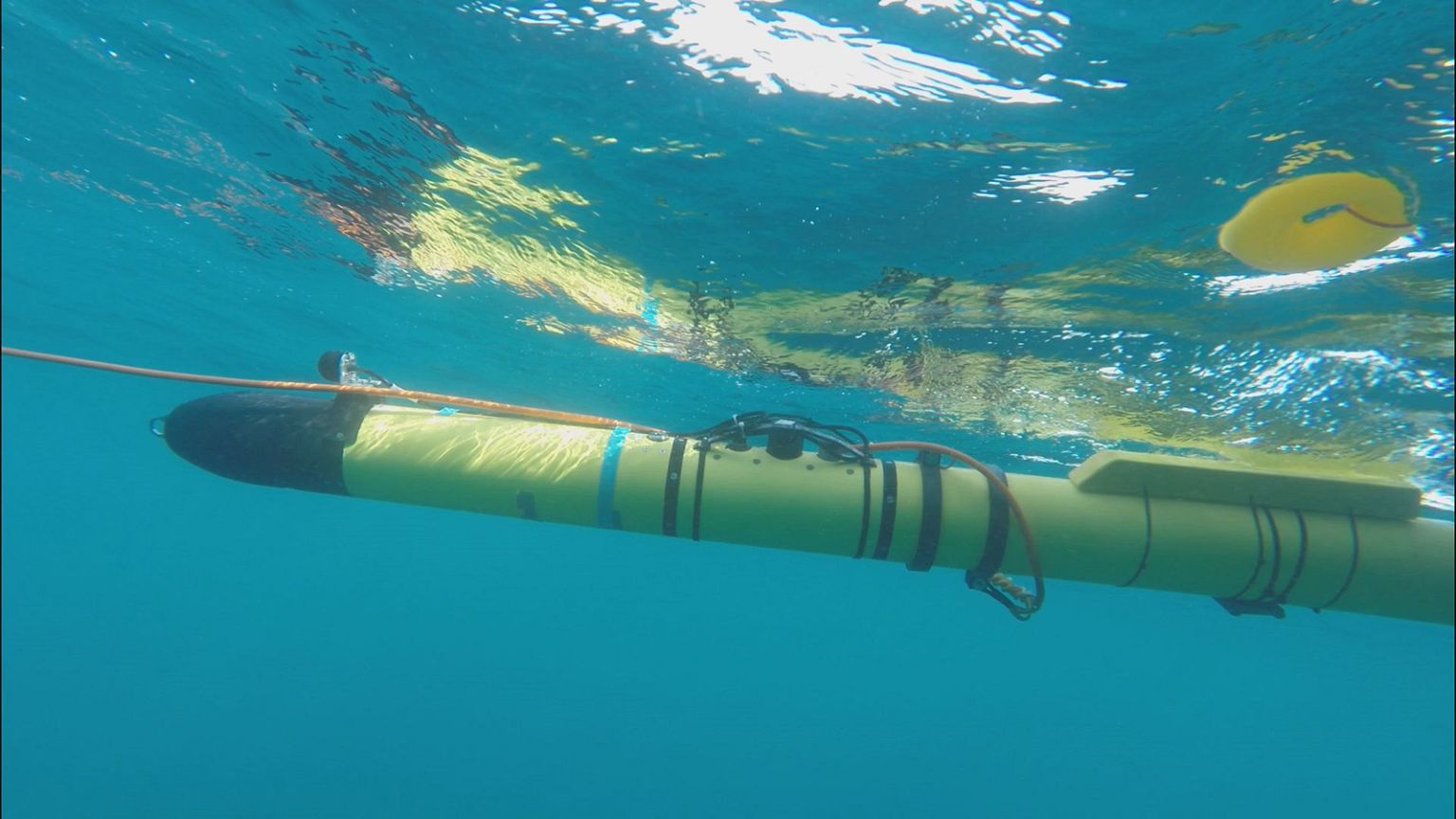
Das System oder die Plattform, wie die Wissenschaftler sagen, besteht aus zwei kleinen Katamaranen, Computern und einer Vielzahl von Unterwasserrobotern, die mit Hydrophonen ausgestattet sind.
Elbert Kelholt, Geo Marine Survey Systems: "Was Sie hören, sind elektrische Impulse. Im Wasser befinden sich zahlreiche Elektroden, die gut 10 Zentimeter voneinander entfernt sind. Kleine Batterien sorgen für ein paar Kilovolt, so entsteht die Schallwelle.
Das Sonarsignal trifft auf den Meeresboden, dringt in den Sand des Meeresbodens ein und reflektiert ein Signal von jeder Schicht, die es durchdringt. Diese Geräusche werden mit den Hydrophonen aufgezeichnet.
Nach eingehender Computeranalyse können wir anhand dieser Reflexionen die Schichten sehen, die unter dem Meeresboden liegen. "
Die Roboter wurden entwickelt, um unter Wasser ein intelligentes, überschaubares und rekonfigurierbares akustisches Feld aufzubauen. Die Forscher möchten, dass Roboter interagieren und als koordiniertes Team Informationen austauschen.
Luís Sebastião, Universität Lissabon: "Eines unserer Ziele war, über so viele autonome Unterwassersonden wie möglich zu verfügen. Unser System basiert auf Atomuhren. Jeder Roboter ist mit einer Atomuhr ausgestattet, was vor einigen Jahren praktisch unmöglich war.
Auf diese Weise können unsere Roboter unter Wasser navigieren. Allerdings, und das ist die nächste Herausforderung, müssen sie sich während der Navigation untereinander abstimmen. Dank Geolokalisierung wissen sie, wo sie sich befinden. Die große Frage ist, wie sie koordiniert gemeinsam manövrieren und in jeder Phase der Mission wissen, wo sie sind."
Existierende Sonar-Erkundungs-Technologien sind aufwendig, langwierig und teuer. Die in diesem europäischen Forschungsprojekt getestete Schwarmtechnologie bietet große Vorteile, sagt Projekt-Koordinator Giovanni Indiveri (University of Salento). "Diese autonomen Sonden können sich unter Wasser zu beliebigen Formationen zusammenfügen. Das Datenerfassungssystem funktioniert quasi als Antenne. Die Flexibilität des Roboterschwarms ist ein großer Vorteil, die Mechanismen werden optimiert, um Signale zu empfangen."
Die Plattform wurde konzipiert, um sich vollständig an Anwendungen anzupassen, bei denen es um die Kartierung des Meeresbodens oder seismische Erkundungen geht.
Laurent Dollon, CGG: "Die Technologie kann beim Bau von Infrastrukturen unter Wasser eingesetzt werden. Oder, in einem größeren Maßstab, bei der Suche nach Mineralien, Erdöl oder Gas".
Auch bei Such- und Rettungseinsätzen, Umwelt- oder Fischerei-Überwachung - oder aber bei archäologischen Erkundungen unter Wasser könnte sich der Roboterschwarm als nützlich erweisen.
Weitere Informationen zum Projekt finden Sie hier.