










Er sollte Temperatur- und Wärmefluss in fünf Metern Tiefe messen, doch so weit kam der Bohrroboter im Marsboden gar nicht.
Der sogenannte "Mars-Maulwurf" gibt seine Mission auf. Er sollte auf dem Mars in rund fünf Metern Tiefe Temperatur und Wärmefluss messen. Doch immer wieder hatte es Probleme mit dem Bohrroboter gegeben.
Er war vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) in Deutschland entwickelt worden und sollte sich mit einem Durchmesser von 2,7 Zentimetern in den Boden eingraben. Das hat er seit seiner Landung vor zwei Jahren versucht.
Ein halbes Jahr lang steckte der Maulwurf bei 35 Zentimetern fest und konnte dann nur mithilfe Roboterarms des Landers der "InSight" ein Stück weiter graben. Im Oktober 2019 schlug der Maulwurf die komplett falsche Richtung ein, sein Bohrarm zeigte nach oben. Zudem mussten die Forscher feststellen, dass der Boden in dem zu untersuchenden Gebiet völlig anders war, als bislang bekannt. Die Wissenschaftler hatten das Design des Bohrrobotersauf Daten basiert, die ein früheres Raumfahrzeug geliefert hatte.
"Wir haben alles gegeben, was möglich war. Aber der Mars und unser tapferer Maulwurf passten einfach nicht zusammen", fasste Tilman Spohn vom DLR-Institut für Planetenforschung nun das Ende der Grabe-Versuche zusammen.
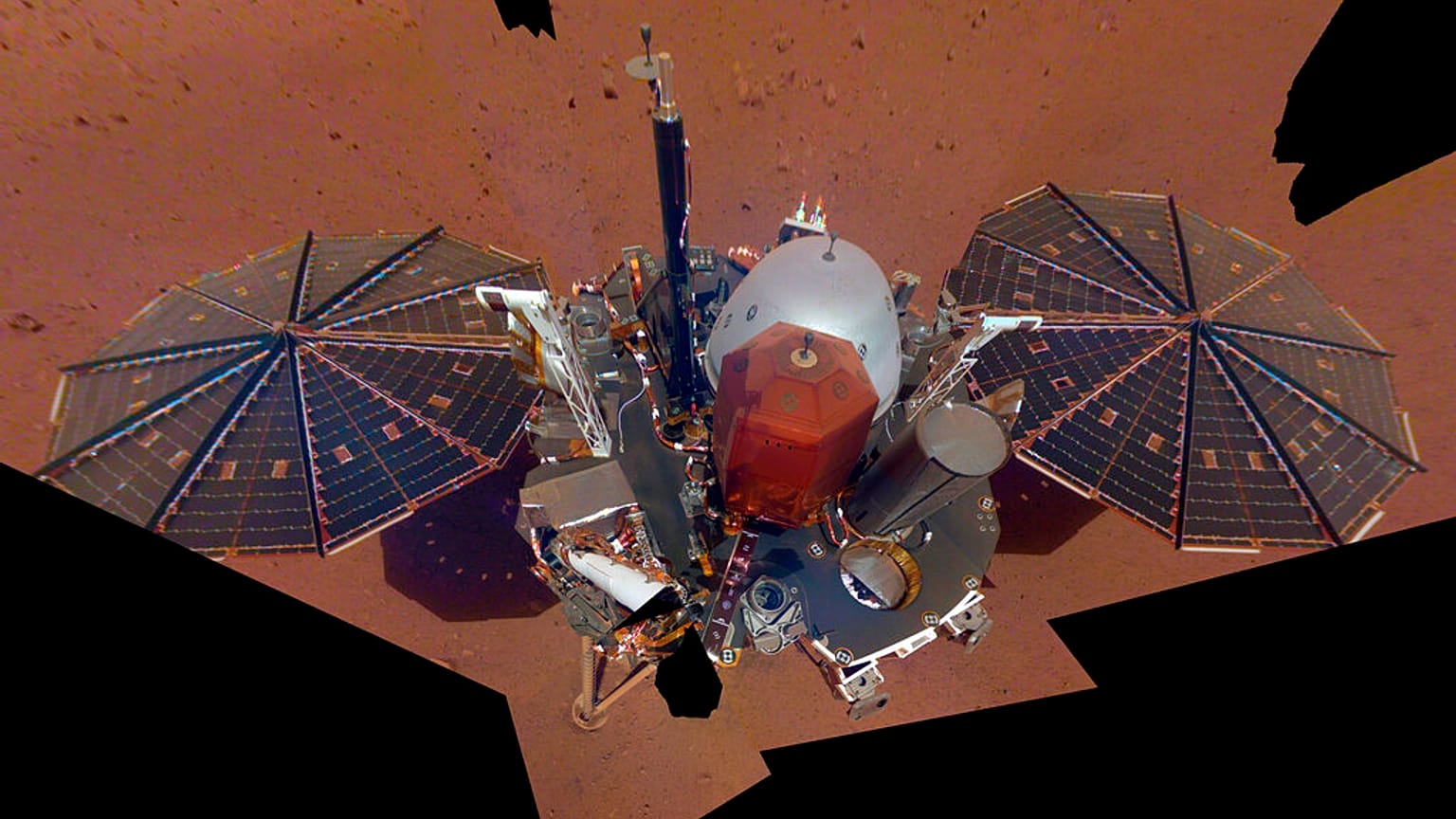
"InSight" hat aber noch weitere Aufgaben. Neben Temperaturmessungen der obersten Schicht des Marsbodens liefert ein Seismometer Daten zu Erschütterungen auf dem Mars, von denen bislang 500 registriert wurden, zudem läuft ein Funkwellen-Experiment zur Beschaffenheit des Kerns des Planeten und weitere Wetter-Sensoren liefern zusätzliche Daten.